精密加工業
金屬物體表面瑕疵怎麼檢?
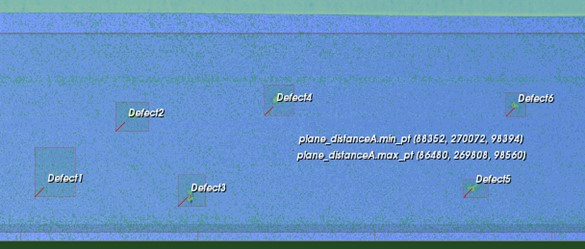
檢測金屬物體表面瑕疵,並且記錄深度
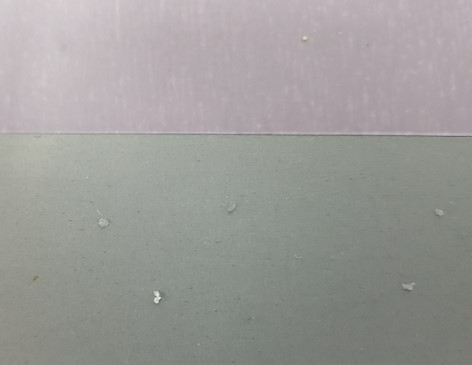
金屬表面由於光滑且易於反光,以AOI拍出的影像有可能受到表面背景的雜訊或顏色影響,造成瑕疵不易檢出。同時,量測深度需要3D sensor較為適合。上圖就是一個在金屬表面上有多個瑕疵的待測物,在這個案例中我們以Teledyne DALSA的Z-Trak2 3D sensor搭配Sherlock影像處理演算法,進行視覺檢測並擷取相關特徵之後,再輸出成像。

取得完整3D profile再分析影像
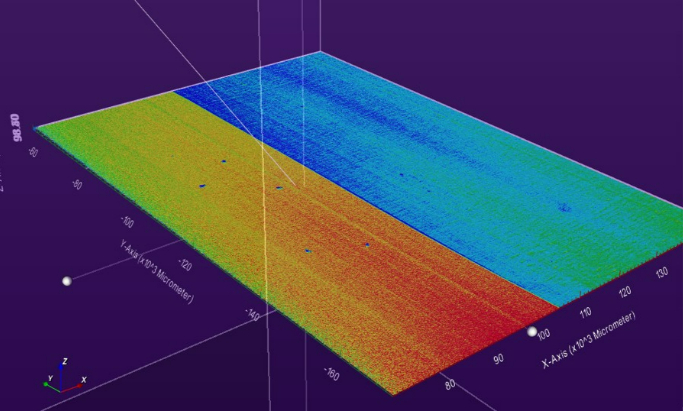
Z-Trak2 3D雷射輪廓感測器內建強大的Built-in reflection演算法,提供高精度和高穩定性的操作,每個Profile提供2000個點,能夠精準檢測出瑕疵表面。 它同時會自動生成點雲檔,提供使用者進行後續影像處理。從Z-Trak2的顯示介面中也可以清楚發現,黃色的區域中,有數個藍色的點狀物,即為客戶希望檢測出的表面瑕疵點。
當Z-Trak2 3D雷射輪廓感測器設定完畢後,便可使用Sherlock串接工業相機,即時取像並分析、檢測雷射輪廓感測器所拍攝的影像。

以演算法進行影像前處理,再計算瑕疵深度
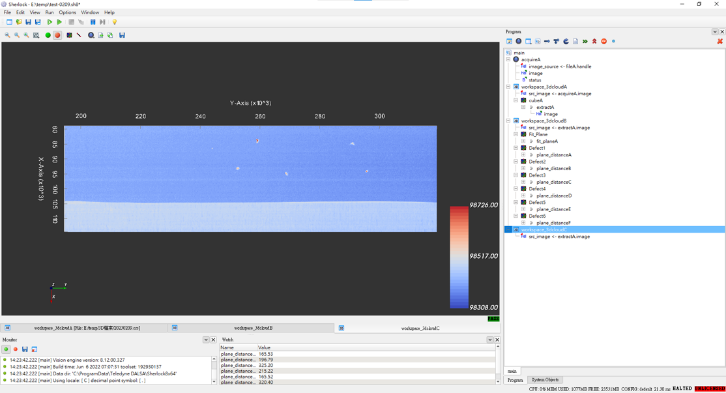
上圖是Sherlock8之操作介面,畫面中心即為所拍攝之3D Profile,以及透過Sherlock的流程編輯功能,檢驗出物體表面之瑕疵。 透過不同的打光方式,結合軟體演算法,以消除表面背景影響,例如雜訊或顏色,便能使用Sherlock的影像處理演算法,進行視覺檢測並擷取相關特徵後輸出成像。
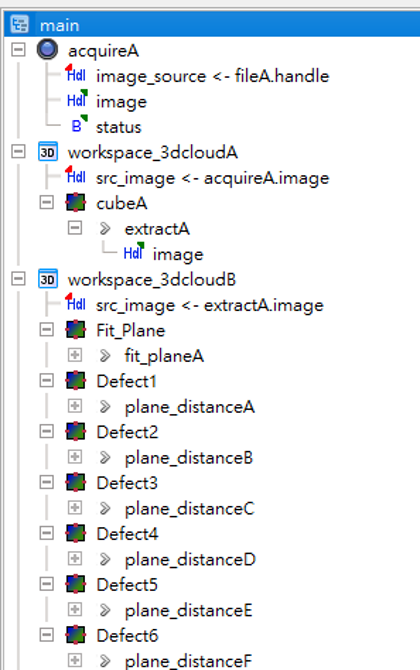
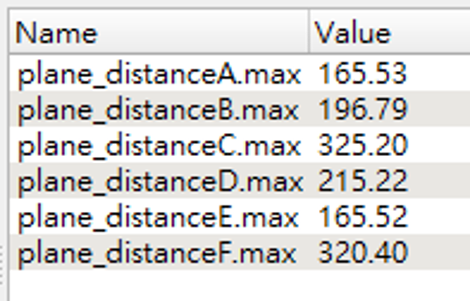
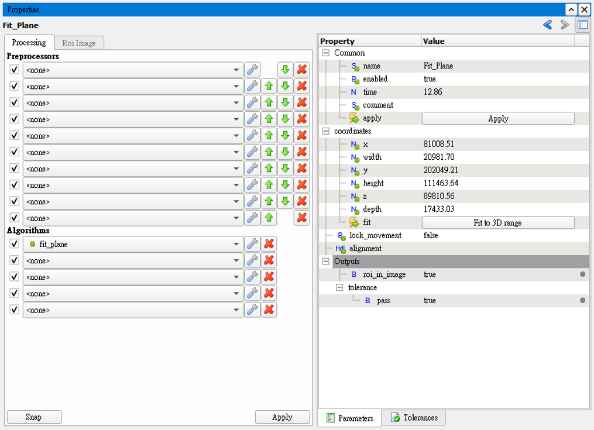
檢驗出瑕疵後,便可透過流程編輯,計算出瑕疵深度。