Sherlock® 是業界領先的無代碼機器視覺軟件開發環境,提供了一套功能強大且經過驗證的工具,已在全球數千個安裝中得到應用。在機器視覺行業中以靈活性著稱,能夠滿足各種視覺檢測應用的需求。
它能夠快速且可靠地開發和調試檢測,並且通過:
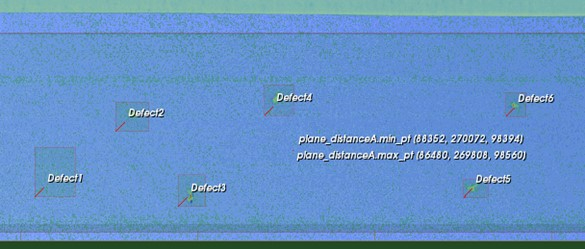
①在製造周期早期識別缺陷來提高客戶滿意度,
②通過自動化的24/7運行來提高生產力,
③通過提高良品率和將技術工人重新分配到其他優先任務,進而降低生產成本

重磅更新:Sherlock 8
Sherlock 8 提供了全新的強大開發工具,擴展了應用範圍,不僅限於傳統的影像檢測。
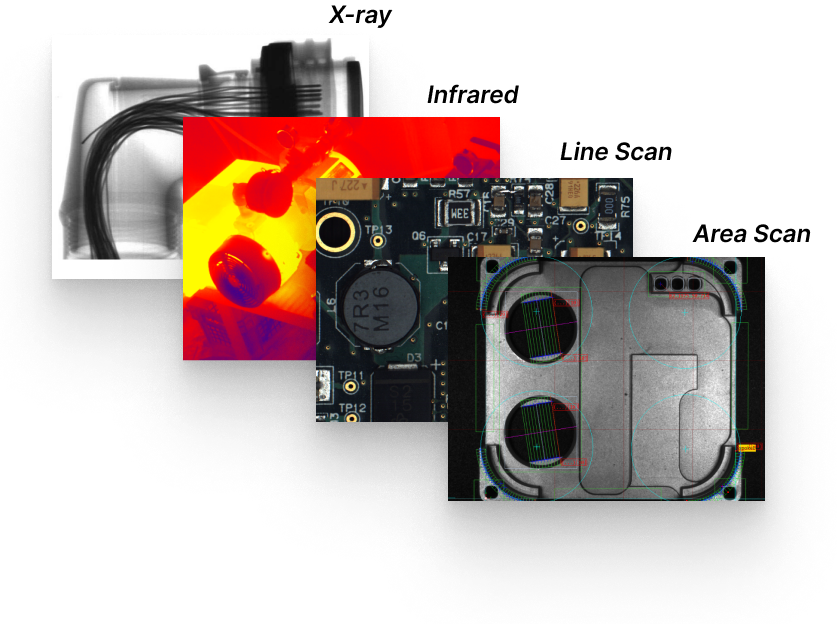
支援各種區域掃描、線掃描和紅外線相機,並新增對 AI 模型推斷和 3D 測量的支持,使得建立更全面的檢測應用成為可能。
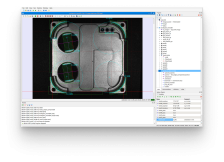
整合AI,更強大
使用Sherlock 8和Astrocyte就能實現快速、無代碼的開發和部署,建立 AI 驅動的視覺系統。
您可以利用Teledyne DALSA的Astrocyte AI訓練器訓練最先進的AI模型, 利用Sherlock的AI工具將AI模型部署到生產環境中,也可以在CPU或GPU上運行模型,或輸出AI模型,結合Sherlock的1D和2D視覺工具,以實現更高級的影像處理。
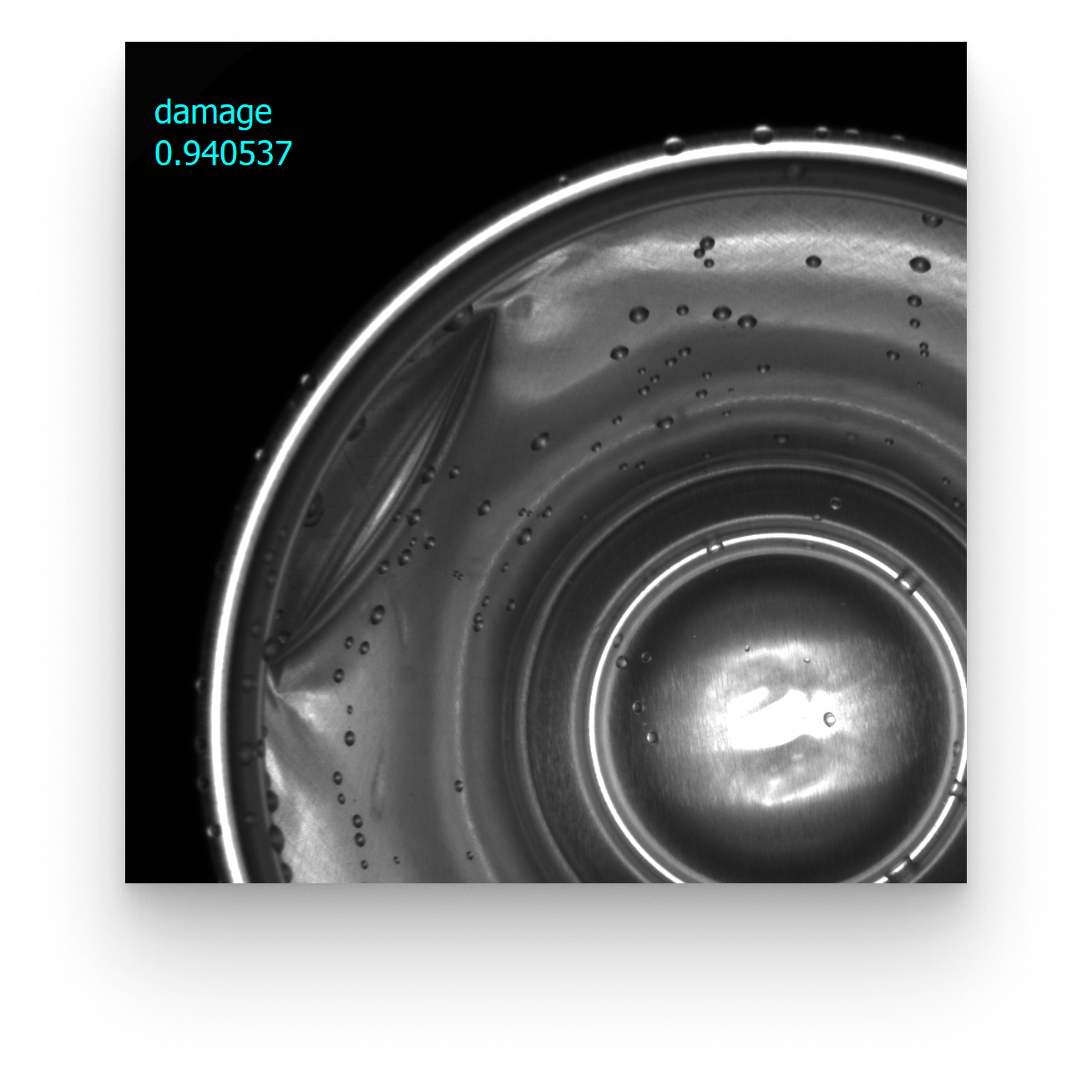
不止AI,還能整合3D
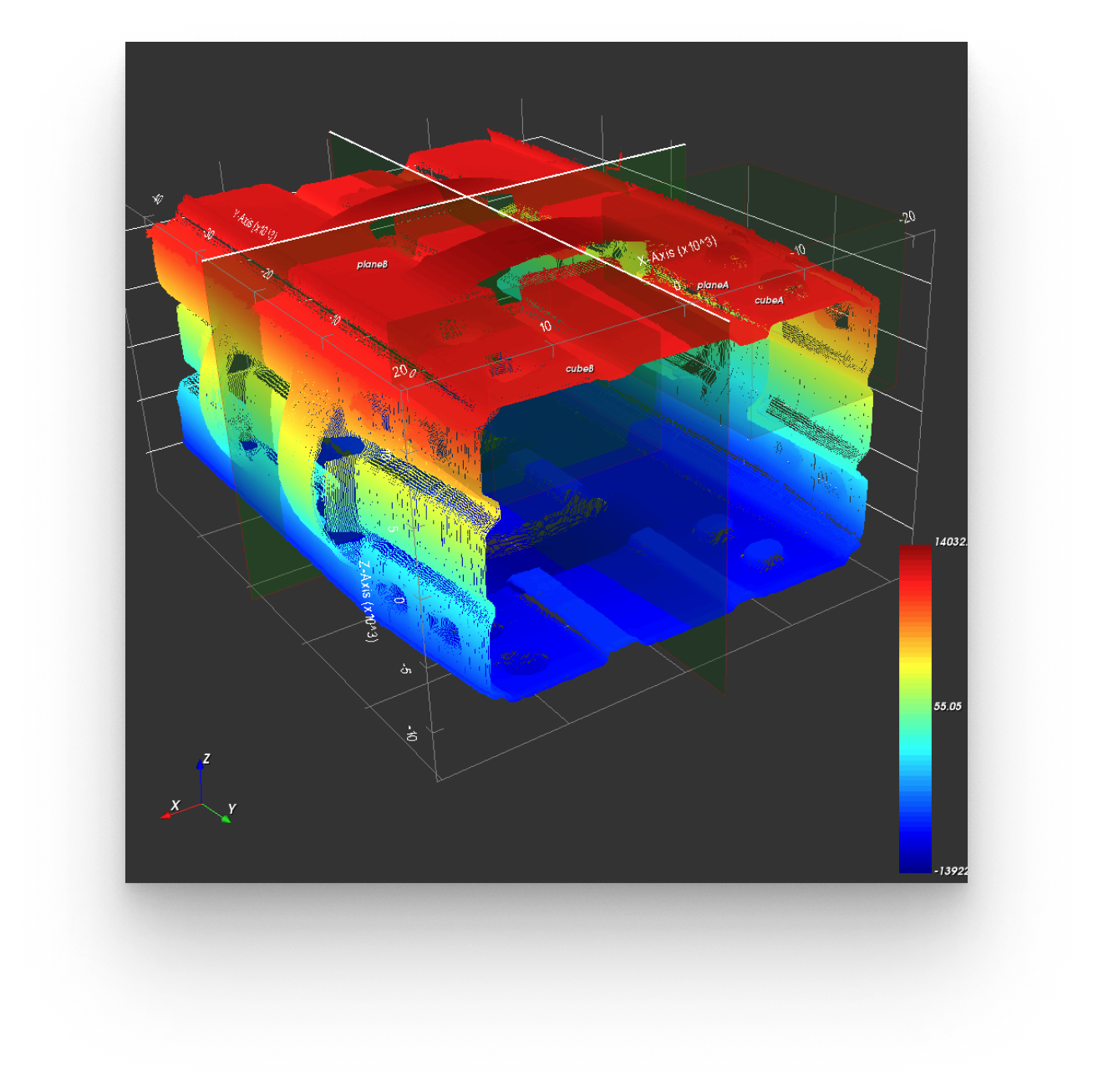
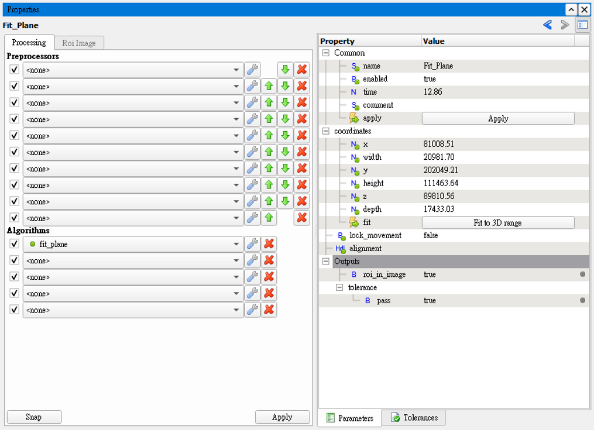
Sherlock能夠與Teledyne DALSA的Z-Trak 3D激光輪廓儀協同工作。Sherlock的3D工具是一套強大且靈活的套件,擁有強大的圖形工具,使得將 3D 零件測量輕鬆整合到工業應用中變得更加簡單。
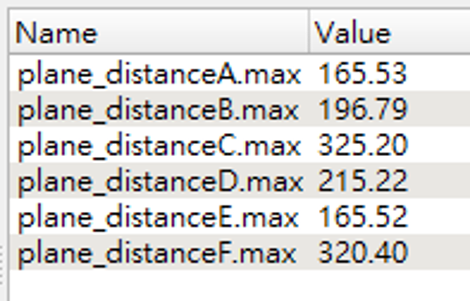
- 輪廓模式:獲取零件的單一橫截面輪廓,並創建精確到微米的 2D 測量。
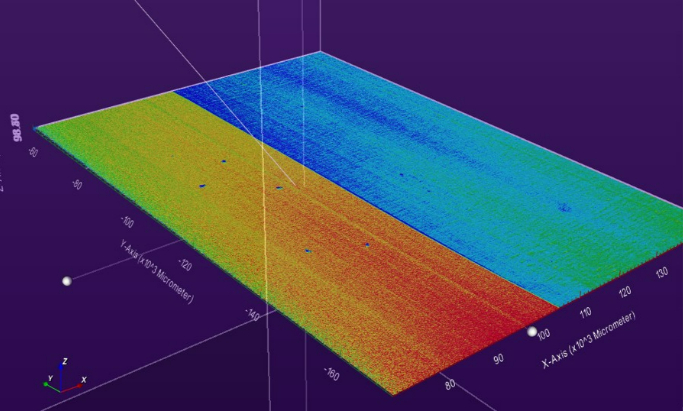
- 範圍圖模式:掃描零件並輸出 Z 高度範圍,提取攝像頭無法觀察的 3D 特徵。將 3D 數據轉換為影像,並使用 1D 和 2D 工具檢查缺陷。
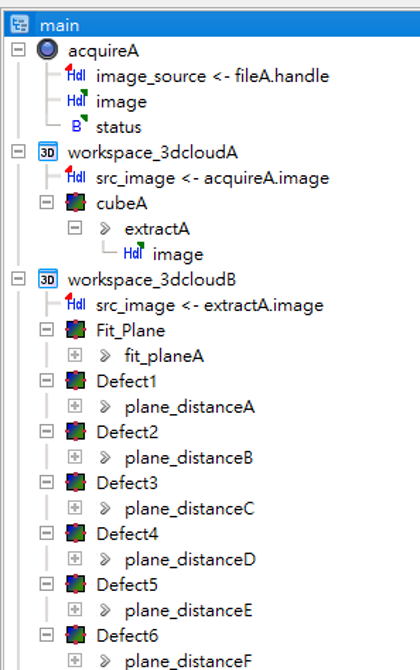
- 掃描模式:創建零件幾何形狀的 360 度 3D 點雲。使用 Sherlock 的 3D 統一測量空間工具檢查特徵。從 3D 數據中創建平面橫截面切片,並使用 2D 工具提取精確到微米的測量。
更多獨家特色
Sherlock 包含了廣泛的計算機視覺算法,這些算法被設計和打包以便於使用,並提供了圖形化控制界面以進行開發和微調:
①預處理器 提供一套全面的影像條件處理功能,可在分析之前應用於感興趣區域 (ROI)。
②定位工具 先進的圖案尋找工具,用於物體位置和對齊。
③測量工具 精確的工具,用於定位邊緣和計算各種部件和形狀的尺寸。
④分析工具 用於查找和計數邊緣、提取和分析特徵、檢測對比度變化以及進行統計分析的工具。
⑤校準工具 校正線性、非線性和透視影像畸變。將相機像素轉換為實際坐標。
⑥顏色工具 能夠分析顏色或測量 RGB 值,用於精確的製造和質量檢查。
⑦條碼工具 讀取和驗證 1D 和 2D 條碼。檢查條碼的分級和質量。支持最常見的條碼格式。
⑧OCR 工具 讀取和識別印刷、模壓或壓印的文字。可以教導字符集或使用預訓練的基於神經網絡的 OCR 工具。
⑨腳本工具 基於 JavaScript 的腳本工具,配有拖放指令編輯功能,允許開發自定義公式、也能夠在產線上或背景運作。
⑩權限管理 控制未經授權的訪問、編輯和複製,以保護系統安全。
⑪計算成像 Sherlock支持SFS(shape from shading)功能,這結合了多方向光源和計算成像算法,以突顯使用常規光源難以成像的表面特徵。
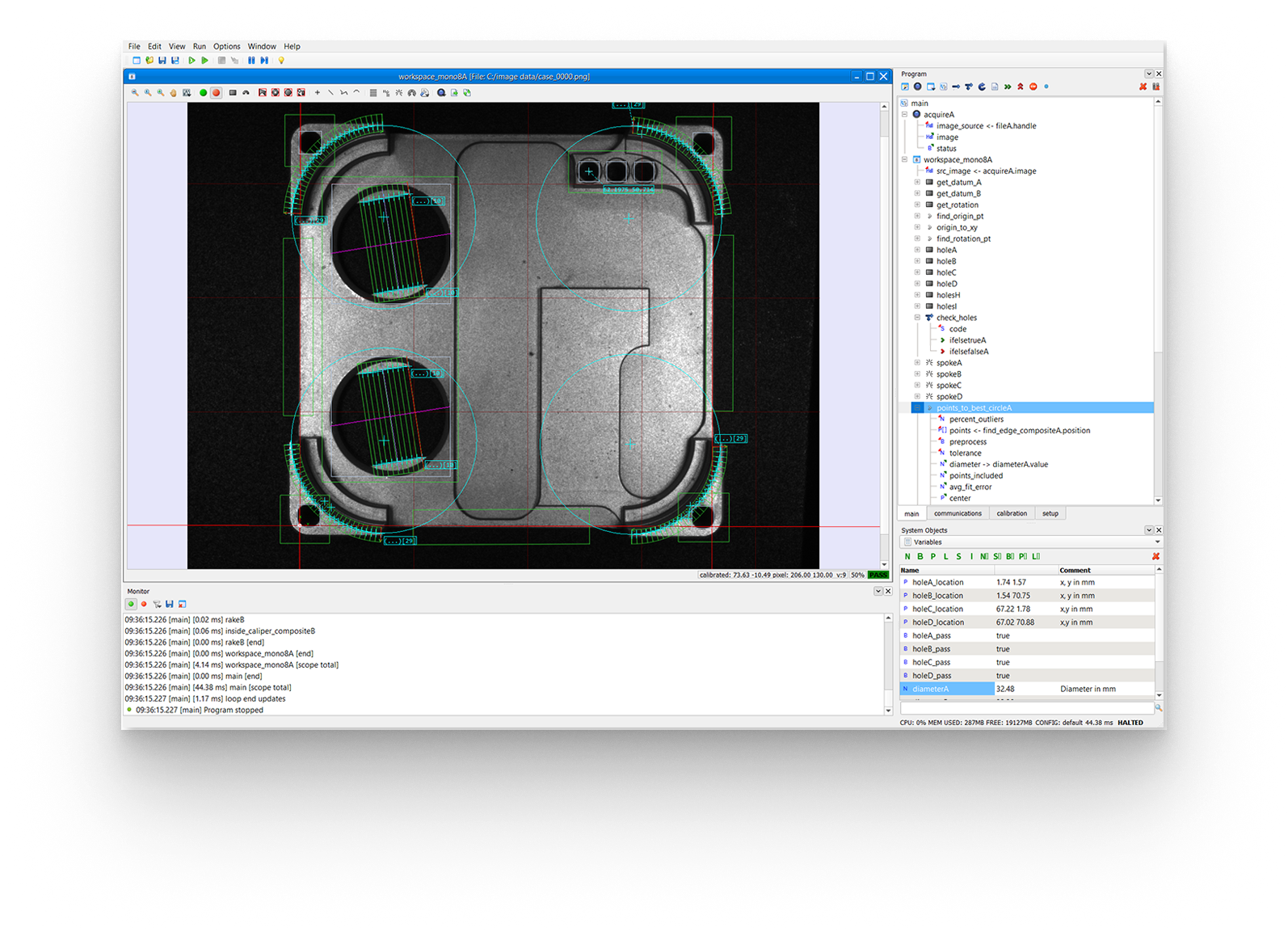
強大的開發介面
- 點擊操作的程式建構功能實現快速編程
- 可移動和停靠的窗口提供最佳的開發者佈局
- 多樣化的感興趣區域 (ROI) 選項提供影像處理的靈活性
- 監控和報告窗口提供即時狀態反饋
- 指令工具欄允許快速訪問程式功能
- 內建編輯和除錯工具
自訂GUI支援
 使用 Sherlock 的無代碼、拖放式 GUIBuilder™ 工具創建自訂操作介面,或使用 .NET API 創建強大的用戶介面。.NET API 支援 C++、C# 和 Microsoft® Visual Studio® 中的 Visual Basic®。
使用 Sherlock 的無代碼、拖放式 GUIBuilder™ 工具創建自訂操作介面,或使用 .NET API 創建強大的用戶介面。.NET API 支援 C++、C# 和 Microsoft® Visual Studio® 中的 Visual Basic®。
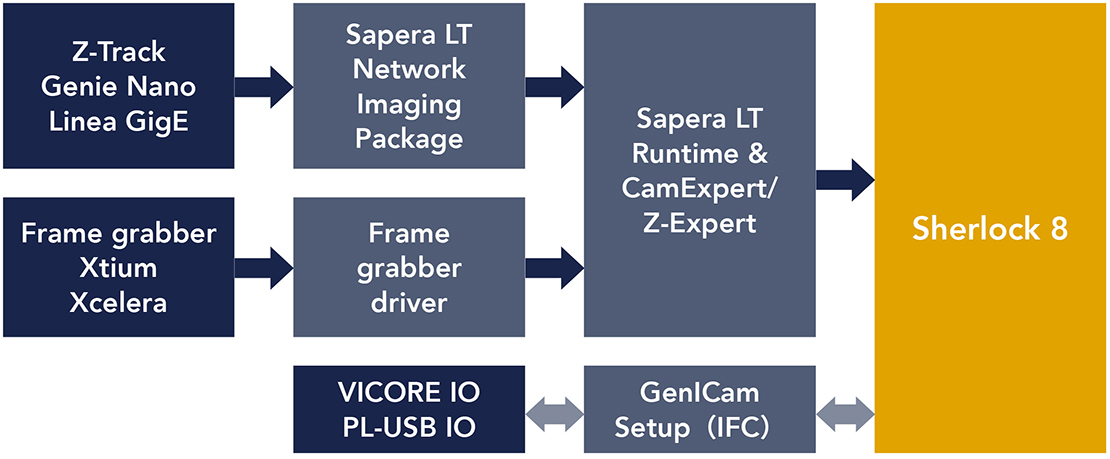
支援多款相機,給您最大靈活度

- 完全支援 Teledyne DALSA 的相機和影像擷取卡,並內建 Sapera LT 功能於 Sherlock 中。
- 支援區域掃描(Area Scan)和線掃描(Line Scan)相機,無論是單色還是彩色格式感測器。
- 支援紅外線和 X 射線成像。
- 允許在同一應用中混合使用不同類型、解析度和介面的感測器。
- 使用 GeniCam™ 支援第三方相機。
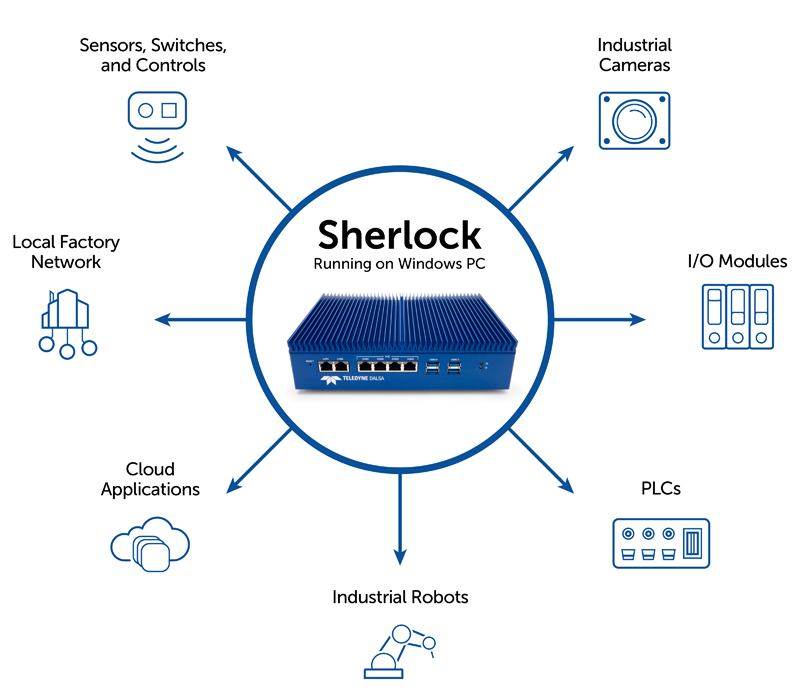
支援多種通信協議
Sherlock 設計為支持自動化的 24/7 現場運行,提供易於使用的工具來設置、讀取和寫入數據至工廠自動化設備,如 PLC 和工業機器人。Sherlock 支援多種通信協議,如 Modbus、Ethernet/IP、Profinet、OPC UA、MQTT、串行通信,並支援板載的離散 IO 控制。

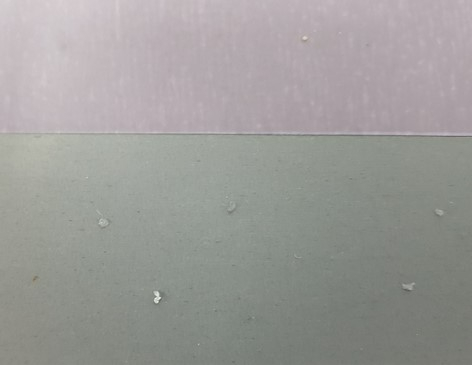
SFS(Shape from Shading(功能)
結合多方向光源與先進的軟件算法,消除表面背景效果,如噪音或顏色,並生成專注於與檢測最相關特徵的輸出影像。這個輸出影像可以使用標準的 Sherlock 視覺工具進行檢查。這一特徵非常適合於具有 3D 紋理的特徵,例如壓花字符,以及印刷或雕刻標記等凹陷或嵌入式特徵。


Teledyne DALSA,DALSA,Image Processing,Image Processing Software,AI,AI software,metal defect inpection,金屬表面瑕疵檢測,AI軟體,Sherlock,Sherlock 8,AI+3D,shape from shading,SFS功能,金屬 表面 瑕疵檢測,金屬 表面,DALSA AI,DALSA Sherlock,Sherlock AI,AI 影像處理,AI 軟體,影像軟體,2D影像軟體,2D影像 軟體,影像系統軟體,瑕疵 檢測,瑕疵 深度 量測,深度 量測,表面 瑕疵,Sherlock 8,影像前處理,演算法,AI 演算法,軟體 演算法,影像處理 演算法,視覺檢測,視覺 檢測,開發環境,無代碼,0代碼,識別缺陷,識別 缺陷,AI+AOI,AI AOI,影像 檢測,模型推斷,Astrocyte,DALSA Astrocyte,Astrocyte AI,AI工具,模型 部署,AI模型,3D+AI,AI+3D,AI 3D,3D AI,預處理,ROI,感興趣區域,定位,物體定位,對齊,物件對位,計數邊緣,計數 邊緣,提取 特徵,分析 特徵,對比度變化 檢測,對比度 變化,校正 線性,校正 非線性,透視 影像畸變,影像 畸變,座標 轉換,顏色 分析,條碼 讀取,條碼 驗證,OCR,文字 讀取,文字 識別,文字 辨識,字元 辨識,字符 辨識,預訓練,計算 成像,shape from shading,計算成像,快速編程,GUI,GUI 支援,C++,C#,Microsoft Visual Studio,Visual Basic,Sapera LT,通信協議,消除 表面 背景,消除 背景,壓花 字符,凹陷,嵌入式特徵,嵌入 特徵,印刷,雕刻標記,雕刻