在勞動人力不足的大趨勢下,人機協同將是智慧製造領域中的重要領域。因應「與人一起工作」的情境越來越多,不論是協作型機器人(Cobot)、自動導引車(AGV)、自主移動機器人(AMR)的需求將日益增加。但密切的人機合作,也將讓安全防護成為關鍵議題。
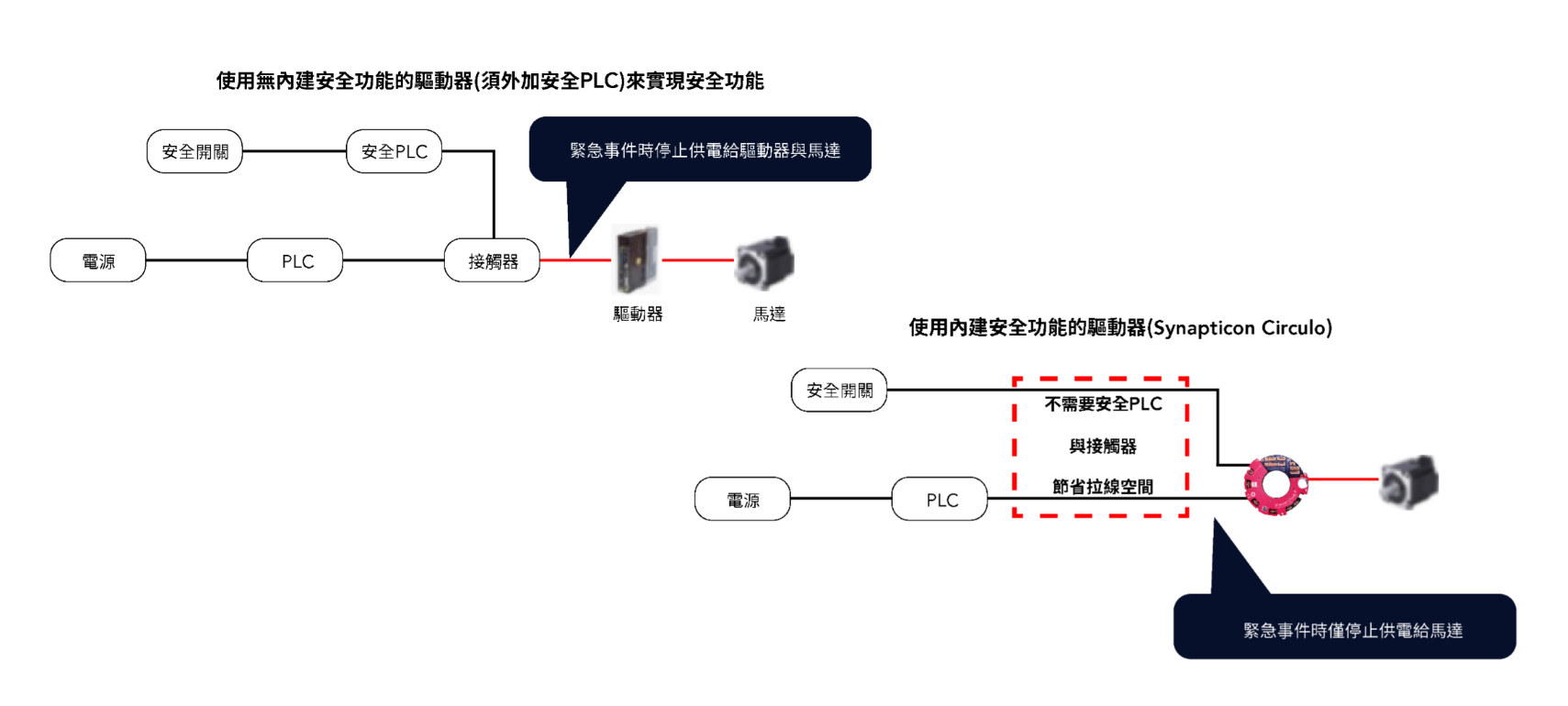
過去實現安全機制的方法,就是加上安全PLC偵測由中央控管,當遇到緊急事件時,立即停止所有電力輸出,強制停止運作。如此雖能停止機器進一步損壞,但粗暴直接的斷電方式,卻可能由於非預期方式停工,而造成產品損傷、現場混亂等後果,還可能帶來難以估算的復工時間。如果使用具有安全機能的驅動器,則能夠讓馬達依規劃減速到停止,以將預期外的損失降到最低。
看到這裡,您可能會想:如果想導入具有安全機能的馬達驅動器,是不是一定得耗費大量金錢及時間,更換現有硬件或線路?
其實,市面上已有結合馬達驅動器、及安全機能的整合性產品,比如德國Synapticon就把安全機制以模組化方式,整合進最新一代的伺服驅動器SOMANET Circulo裡,讓安全功能大幅延伸,不須要更改現有硬件、或者導入複雜接線,就能同時達到監督、生成和接收安全關鍵信號。SOMANET的安全模組提供 STO、SBC、SS1、SS2、SLS、SLP、SLT 等安全功能,符合IEC 61800-5-2。這些功能都可通過FSoE或I/O獲得。
1. 接線更少——無需編碼器電纜穿過整個機器人手臂,更可移除接觸器等傳統安全組件。
2. 快速響應——將安全處理從安全PLC卸載到驅動器單體。
3. 維持電力狀態——無需移除驅動器電源即可實現安全模式。
4. 產線持續生產——安全模式無需完全關閉機器電源也可調整機器。
5. 節省成本——與傳統安全解決方案相比,省時也省硬體成本。
1. 機械手臂:微調參數後,即可立即投入生產運行
■ 解決方法:使用SS2(Safe Stop 2)快速讓所有關節馬達停止, 再以SOS(Safe Operating Stop)監控。
2. 自動導引車:無人車運行過程中,如遇作業人員侵入,車子會自動停止。
■ 解決方法:若人員接近,可以利用SLS(Safely-Limited Speed)功能,讓自動導引車繼續以安全速度運行,無需停止。如果作業人員過於靠近,可利用SBC(Safe Brake Control)功能,安全地停止導引車。
3. 工業機器:電子元件檢測發現擺置異常, 需要調整位置或是移除。
■ 解決方法:使用SLS(Safe Limited Speed) 可以在安全運行設備的同時,解除異常狀態,實現無縫切換安全速度與正常速度。



以上是針對AMR, AGV及協作機器人在設計時需留意的安全趨勢分析,以及相應的解決方案。如果您有興趣進一步瞭解詳情或更多技術細節,請隨時跟LINX Taiwan的工程團隊聯絡。