為了節省AGV的電力消耗,縮小AGV車體是最直覺且快速的方式,德國Synapticon新開發的伺服馬達控制器--SOMANET Circulo All-in-One伺服驅動器,除了高度整合驅動器,剎車,安全模組與編碼器於一身外,其搭配的馬達模組運作調控OBLAC軟體,透過分析整體馬達模組的電流(含軸、運作負荷等)開發出最效率化的控制模型,讓量產馬達模組成本降低30%,功能強大且簡易上手,只要跟著以下操作步驟就能輕鬆調控!
首先,因為OBLAC需在Linux 環境下開發,所以我們需要先下載VMware以建立虛擬磁碟空間,接著就可以下載我們今天的主角--馬達模組運作調控OBLAC軟體,以VMware的部署檔案OVA格式呈現。
(下載連結如下:Vmware 虛擬磁碟工具連結 、 Synapticon OBLAC OVA檔)
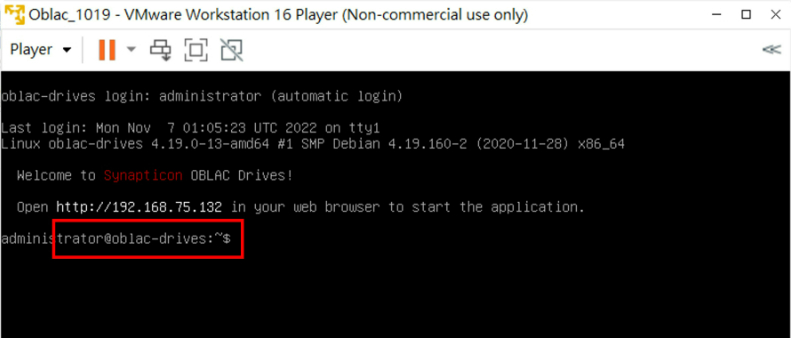
1. 安裝Vmware主程式後,再開啟OBLAC OVA檔,您會收到一組IP,如下圖所示:
2. 將Synapticon驅動器上電,接上電腦與驅動器之間的網路線,再開啟網路瀏覽器,輸入剛剛得到的IP address,您就會看到以下畫面,如下圖所示:
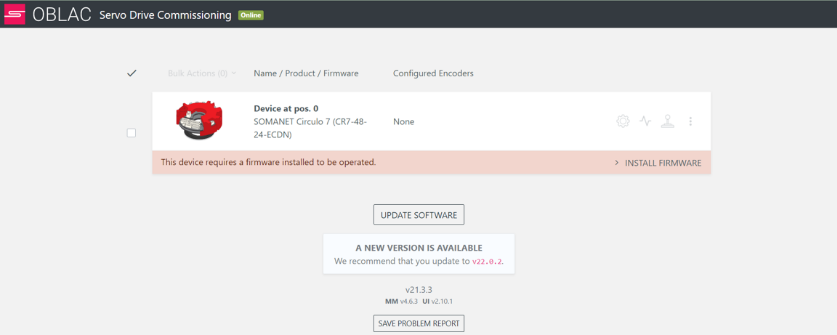
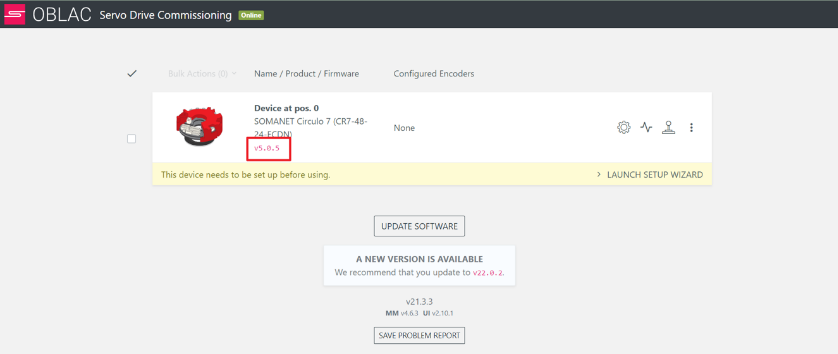
3. 先點選右邊 “INSTALL FIRMWARE” 安裝最新版韌體,成功後會顯示安裝的韌體版本,之後點選 “LAUNCH SETUP WIZARD”,就可以開始設定驅動器參數與馬達調控了,如下圖所示:
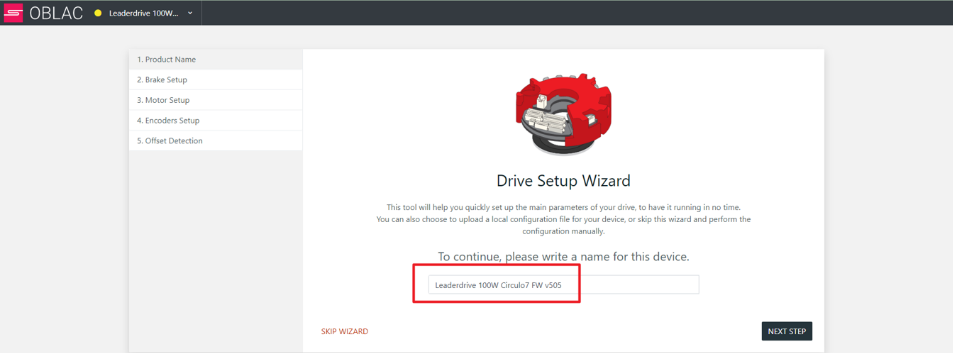
1. 命名驅動器
建議以對應馬達規格與韌體版本為命名方式
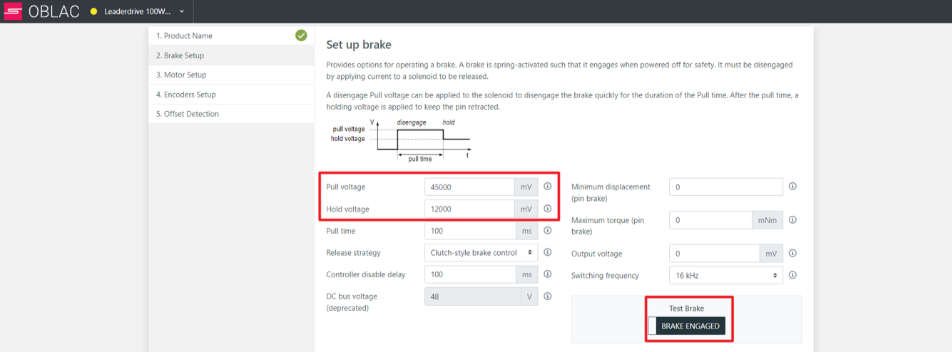
2. 設定剎車規格
根據剎車規格輸入相關工作電壓,驅動器可以根據輸入值產生對應的電壓來控制剎車。值得注意的是,在條件允許之下,越小的工作電壓可以越省電。另外右下方的 “Test Brake”可以讓您測試剎車功能是否正常。
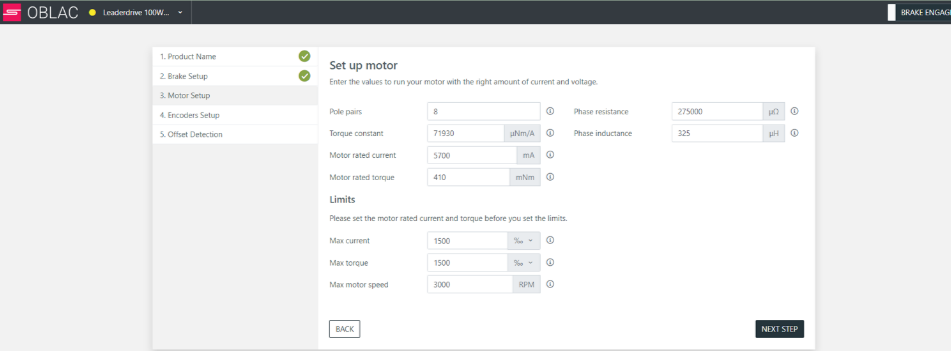
3. 輸入馬達相關參數
根據馬達規格輸入對應參數,這裡需要注意每一項參數的單位。
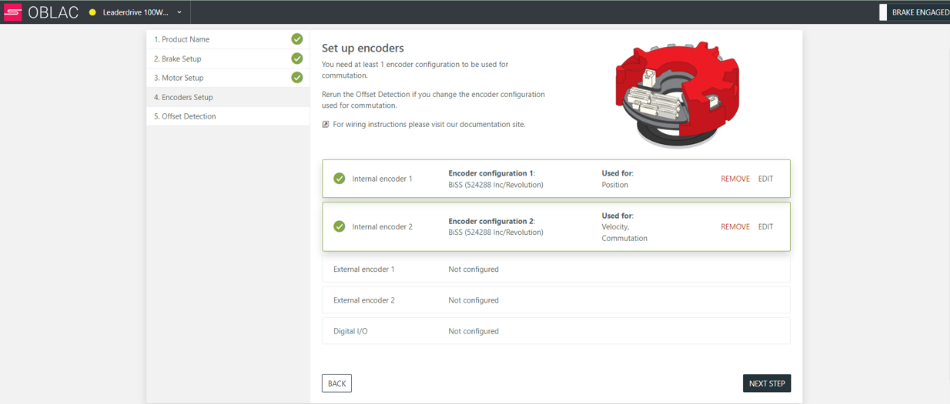
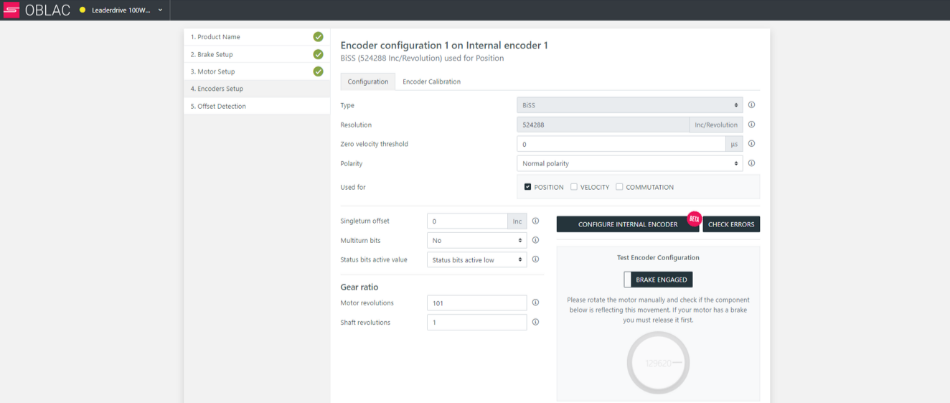
4. 設定編碼器
Circulo支援兩組內建編碼器與兩組外接編碼器。而Node支援四組外接編碼器。於對應接線編碼器輸入埠輸入編碼器的類型、參數,以及其對應的功能,例如換相,速度換算,與位置換算等等。隨後可以轉動馬達,測試編碼器值是否隨之改變,測試前記得要先點選右下的 “Brake Release”以釋放剎車。
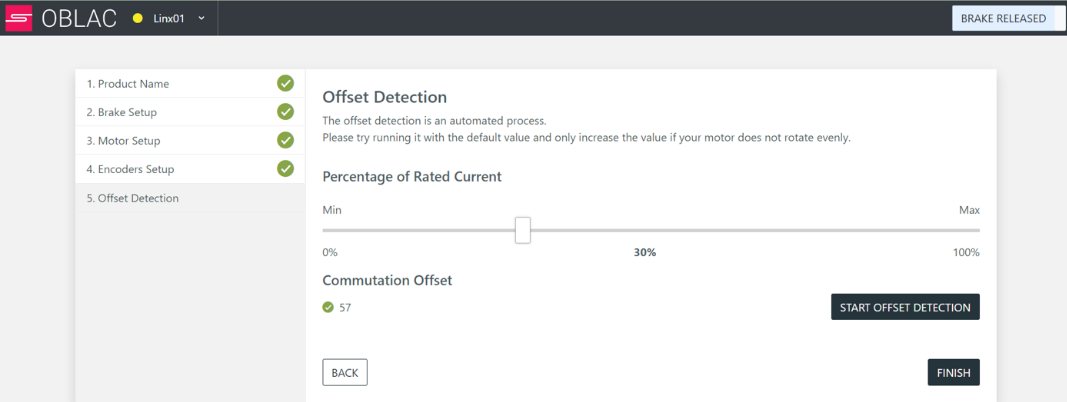
5. 換相角度偏差計算
此步驟驅動器會自動運行,估算馬達電角與機械角關係,以完成磁場定向控制,一般來說空載時以30%額定電流做偵測即可。
當對應馬達規格的相關參數都設定完成後,我們可以先在“PLAYGROUND”嘗試以轉矩控制試運行這顆馬達,若設定皆正確,馬達應該可以正常運轉。

OBLAC也提供轉矩,速度與位置的命令值與目前值的觀測功能,可以搭配波形放大時間軸觀測每一個時間的運轉變化。
我們可以點選”TUNING”,進行PID值微調。OBLAC提供自動與手動調整模式。一般來說自動調整的PID值已可滿足多數需求,若需進一步精度調整,再開啟手動模式微調即可。
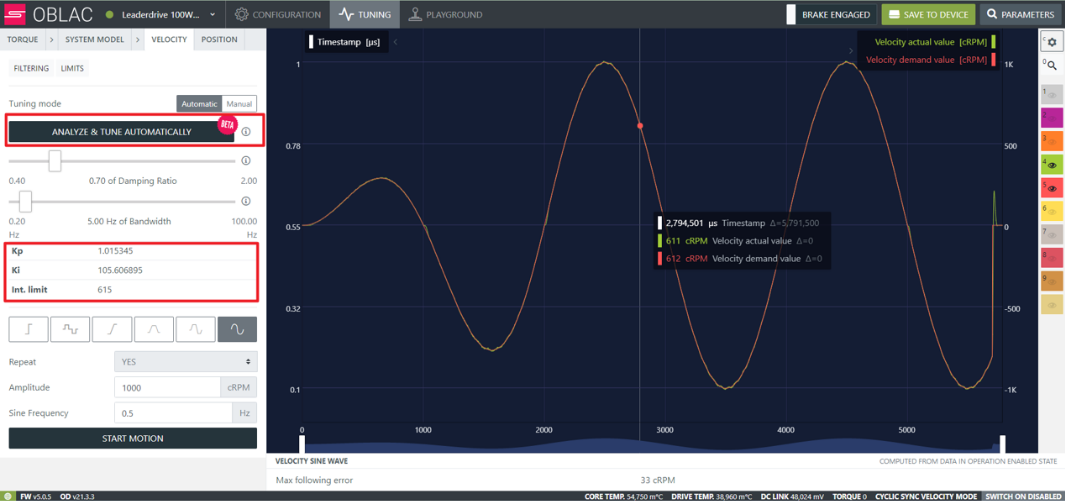
另外,OBLAC也提供幾種測試波形,使用者可以針對不同的操作需求,利用這些波形來驗證其馬達運行的可靠性。
以上就是OBLAC馬達調控過程的相關介紹,只要遵循以上步驟,便可輕鬆調控馬達。若您對Synapticon相關產品有任何疑問,不管是驅動器或是調控軟體,都可直接點選下方按鈕獲取詳細介紹,也歡迎您直接來電或來信詢問。